Strain and strain-displacement relations
The shape of a solid or structure changes with time during a deformation process. To characterize deformation, or strain, a certain reference configuration is adopted and called undeformed. Often, that reference configuration is chosen as an unstressed state, but such is neither necessary nor always convenient. If time is measured from zero at a moment when the body exists in that reference configuration, then the upper case X may be used to denote the position vectors of material points when t = 0. At some other time t, a material point that was at X will have moved to some spatial position x. The deformation is thus described as the mapping x = x(X, t), with x = x(X, 0) = X. The displacement vector u is then u = x(X, t) − X; also, v = ∂x(X, t)/∂t and a = ∂2x(X, t)/∂t2.
It is simplest to write equations for strain in a form that, while approximate in general, is suitable for the case when any infinitesimal line element dX of the reference configuration undergoes extremely small rotations and fractional change in length, in deforming to the corresponding line element dx. These conditions are met when |∂ui/∂Xj|<< 1. Many solids are often sufficiently rigid, at least under the loadings typically applied to them, that these conditions are realized in practice. Linearized expressions for strain in terms of [∂u/∂X], appropriate to this situation, are called small strain or infinitesimal strain. Expressions for strain will also be given that are valid for rotations and fractional length changes of arbitrary magnitude; such expressions are called finite strain.
Two simple types of strain are extensional strain and shear strain. Consider a rectangular parallelepiped, a bricklike block of material with mutually perpendicular planar faces, and let the edges of the block be parallel to the 1, 2, and 3 axes. If the block is deformed homogeneously, so that each planar face moves perpendicular to itself and so that the faces remain orthogonal (i.e., the parallelepiped is deformed into another rectangular parallelepiped), then the block is said to have undergone extensional strain relative to each of the 1, 2, and 3 axes but no shear strain relative to these axes.
If the edge lengths of the undeformed parallelepiped are denoted as ΔX1, ΔX2, and ΔX3, and those of the deformed parallelepiped as Δx1, Δx2, and Δx3 (see Figure 5A, where the dashed-line figure represents the reference configuration and the solid-line figure the deformed configuration), then the quantities λ1 = Δx1/ΔX1, λ2 = Δx2/ΔX2, and λ = Δx3/ΔX3 are called stretch ratios. There are various ways that extensional strain can be defined in terms of them. Note that the change in displacement in, say, the x1 direction between points at one end of the block and those at the other is Δu1 = (λ1 − 1)ΔX1.
For example, if E11 denotes the extensional strain along the x1 direction, then the most commonly understood definition of strain is E11 = (change in length)/(initial length) = (Δx1 − ΔX1)/ΔX1 = Δu1/ΔX1 = λ1 − 1. A variety of other measures of extensional strain can be defined by E11 = g(λ1), where the function g(λ) satisfies g(1) = 0 and g′(1) = 1, so as to agree with the above definition when λ1 is very near 1. Two such measures in common use are the strain E M = (λ − 1)/2, based on the change of metric tensor, and the logarithmic strain E L = ln(λ1).
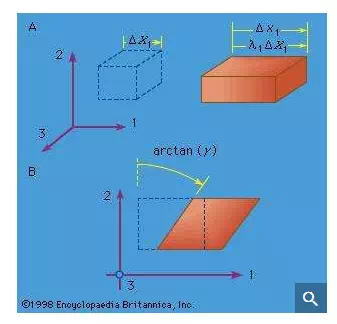
To define a simple shear strain, consider the same rectangular parallelepiped, but now deform it so that every point on a plane of type X2 = constant moves only in the x1 direction by an amount that increases linearly with X2. Thus, the deformation x1 = γX2 + X1, x2 = X2, x3 = X3 defines a homogeneous simple shear strain of amount γ and is illustrated in Figure 5B. Note that this strain causes no change of volume. For small strain, the shear strain γ can be identified as the reduction in angle between two initially perpendicular lines.