Now the linear momentum principle may be applied to an arbitrary finite body. Using the expression for Tj above and the divergence theorem of multivariable calculus, which states that integrals over the area of a closed surface S, with integrand ni f (x), may be rewritten as integrals over the volume V enclosed by S, with integrand ∂f (x)/∂xi; when f (x) is a differentiable function, one may derive that
Equation.
at least when the σij are continuous and differentiable, which is the typical case. These are the equations of motion for a continuum. Once the above consequences of the linear momentum principle are accepted, the only further result that can be derived from the angular momentum principle is that σij = σji (i, j = 1, 2, 3). Thus, the stress tensor is symmetric.
Principal stresses
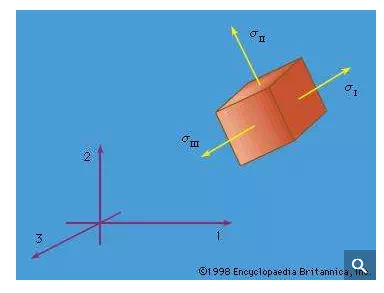
Symmetry of the stress tensor has the important consequence that, at each point x, there exist three mutually perpendicular directions along which there are no shear stresses. These directions are called the principal stress directions, and the corresponding normal stresses are called the principal stresses. If the principal stresses are ordered algebraically as σI, σII, and σIII (Figure 4), then the normal stress on any face (given as σn = n · T) satisfies σI ≤ σn ≤ σIII. The principal stresses are the eigenvalues (or characteristic values) s, and the principal directions the eigenvectors n, of the problem T = sn, or [σ]{n} = s{n} in matrix notation with the 3-column {n} representing n. It has solutions when det ([σ] − s[I ]) = −s3 + I1s2 + I2s + I3 = 0, with I1 = tr[σ], I2 = −(1/2)I + (1/2)tr([σ][σ]), and I3 = det [σ]. Here “det” denotes determinant and “tr” denotes trace, or sum of diagonal elements, of a matrix.
Since the principal stresses are determined by I1, I2, and I3 and can have no dependence on how one chooses the coordinate system with respect to which the components of stress are referred, I1, I2, and I3 must be independent of that choice and are therefore called stress invariants. One may readily verify that they have the same values when evaluated in terms of σij′ above as in terms of σij by using the tensor transformation law and properties noted for the orthogonal transformation matrix.
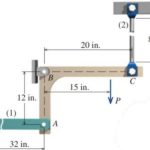
Very often, in both nature and technology, there is interest in structural elements in forms that might be identified as strings, wires, rods, bars, beams, or columns, or as membranes, plates, or shells. These are usually idealized as, respectively, one- or two-dimensional continua. One possible approach is then to develop the consequences of the linear and angular momentum principles entirely within that idealization, working in terms of net axial and shear forces and bending and twisting torques at each point along a one-dimensional continuum, or in terms of forces and torques per unit length of surface in a two-dimensional continuum.